








光栅尺定位精度从4um提高到1um的方法
作者:管理员 发布于:2016-02-22 16:52:44
摘要:光栅尺定位精度从4um提高到1um的方法
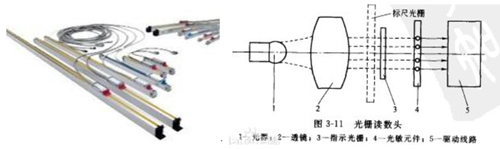
光栅尺,也称为光栅尺位移传感器(光栅尺传感器),是利用光栅的光学原理工作的测量反馈装置。是基于莫尔条纹测量的一种传感器,其工作原理:是由一对光栅中的主光栅(即标尺光栅,固定在机床上)和副光栅(即指示光栅,光栅读数头中)进行相对位移时,在光的干涉与衍射共同作用下产生黑白相间(或明暗相间)的规则条纹图形,称之为莫尔条纹。经过光电器件转换使黑白(或明暗)相同的条纹转换成正弦波变化的电信号,再经过放大器放大,整形电路整形后,得到两路相差为90°的正弦波或方波。
光栅尺的分辨率是指其最低解析度,在显示器上显示的最小变化量,一般的光栅有以下分辩率:0.01mm,0.005mm,0.001mm,0.0005mm,0.0002mm,0.0001mm等,常用的是0.005mm和0.001mm。
光栅位移传感器,要提高其测量分辨率,对光栅输出信号进行细分处理是必要环节.在实际应用中,通常采用四倍频的方法提高定位精度.四倍频电路光栅尺读数头内没有做处理。
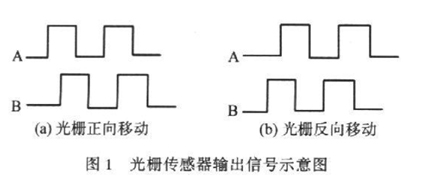
光栅位移传感器出两路相位相差为90的方波信号A和B.如图1所示,用A,B两相信号的脉冲数表示光栅走过的位移量,AB相位差标志光栅分正向与反向移动.四倍频后的信号,经计数器计数后转化为相对位置。
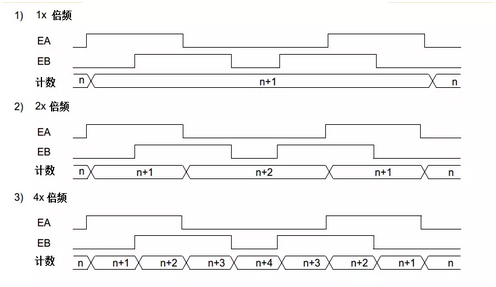
在一个周期内AB共有四个上升与下降沿,AB对应的上升与下降沿之间相差90°,利用在一个周期内对A相和B相的上升沿和下降沿均进行计数,即可实现在一个周期内对编码器计数四次,从而达到四倍频计数的目的(即1um计数一次),普通的是一个周期计数一次(4um计数一次)。
①当光栅正向移动时,光栅输出的A相信号的相位超前B相90,则在一个周期内,两相信号共有4次相对变化: 00→10→11→01→00.这样,如果每发生一次变化,可逆计数器便实现一次加计数,一个周期内共可实现4次加计数,从而实现正转状态的四倍频计数。
②当光栅反向移动时,光栅输出的A相信号的相位滞后于B相信号90,则一个周期内两相信号也有4次相对变化: 00→01→11→10→00。同理,如果每发生一次变化,可逆计数器便实现一次减计数,在一个周期内,共可实现4次减计数,就实现了反转状态的四倍频计数。
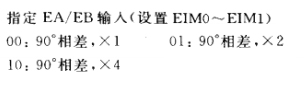
我们的控制器可以灵活设置1,2,4倍频,默认1倍频计数,如下图
ETH6045-0416脱机独立WINCE运动控制器,四倍频实际测试效果
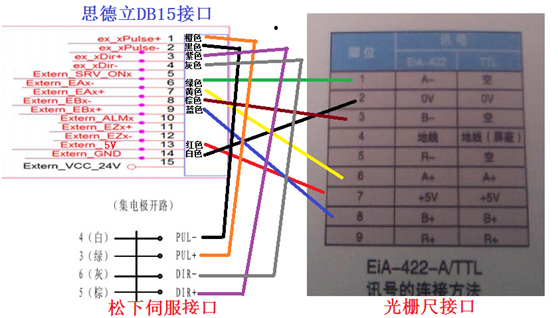
1.控制器DB15接口与光栅尺,松下伺服驱动器接线图。
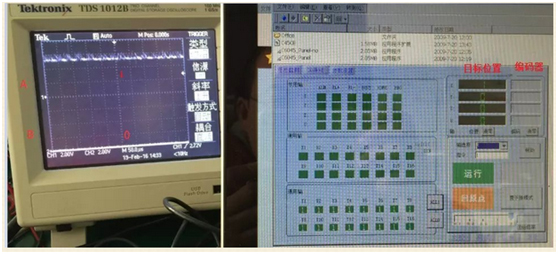
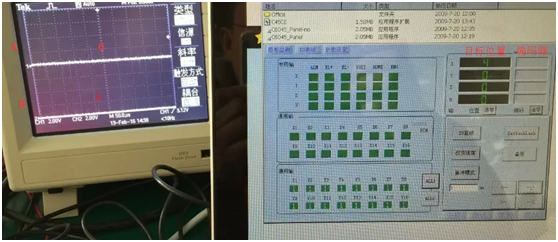
2.软件界面先发1um对应的脉冲,编码器读数为1,示波器看到EA,EB的波形如下,EA=1,EB=0。
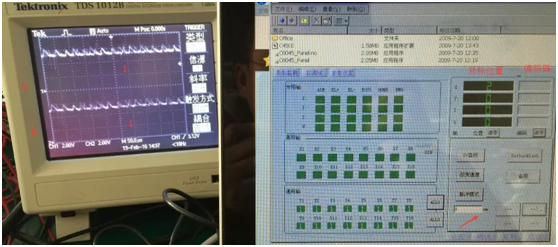
软件界面再发第2,3,4个 1um对应的脉冲后,示波器EA,EB波形如下:
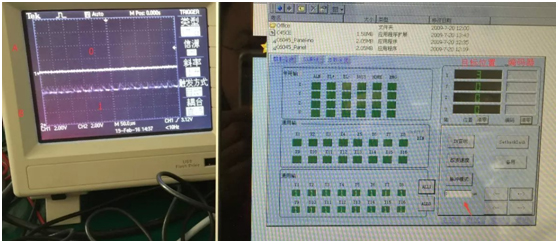
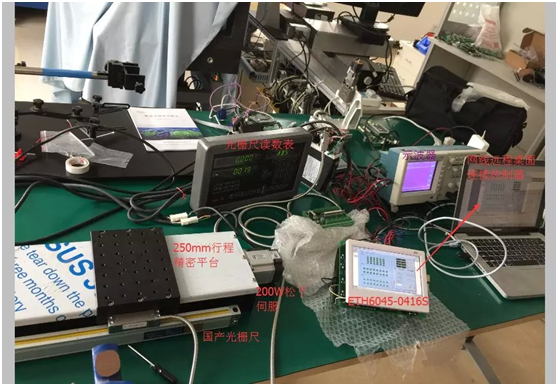
3.测试环境与工具如下图。
光栅尺读数表用于对比控制器读数,电脑通过网线VNC工具控制控制器内部软件,同时通过网口远程单步调试WINCE程序。
需要了解产品具体参数或相关技术问题等,可直接与QQ:67336830或TEL:18971190302 刘工联系。
运动控制专业服务商将为您提供各类运动控制自动化相关系统、完善的售后服务以及专业的技术支持。
光栅尺的分辨率是指其最低解析度,在显示器上显示的最小变化量,一般的光栅有以下分辩率:0.01mm,0.005mm,0.001mm,0.0005mm,0.0002mm,0.0001mm等,常用的是0.005mm和0.001mm。
光栅位移传感器,要提高其测量分辨率,对光栅输出信号进行细分处理是必要环节.在实际应用中,通常采用四倍频的方法提高定位精度.四倍频电路光栅尺读数头内没有做处理。
光栅位移传感器出两路相位相差为90的方波信号A和B.如图1所示,用A,B两相信号的脉冲数表示光栅走过的位移量,AB相位差标志光栅分正向与反向移动.四倍频后的信号,经计数器计数后转化为相对位置。
在一个周期内AB共有四个上升与下降沿,AB对应的上升与下降沿之间相差90°,利用在一个周期内对A相和B相的上升沿和下降沿均进行计数,即可实现在一个周期内对编码器计数四次,从而达到四倍频计数的目的(即1um计数一次),普通的是一个周期计数一次(4um计数一次)。
①当光栅正向移动时,光栅输出的A相信号的相位超前B相90,则在一个周期内,两相信号共有4次相对变化: 00→10→11→01→00.这样,如果每发生一次变化,可逆计数器便实现一次加计数,一个周期内共可实现4次加计数,从而实现正转状态的四倍频计数。
②当光栅反向移动时,光栅输出的A相信号的相位滞后于B相信号90,则一个周期内两相信号也有4次相对变化: 00→01→11→10→00。同理,如果每发生一次变化,可逆计数器便实现一次减计数,在一个周期内,共可实现4次减计数,就实现了反转状态的四倍频计数。
我们的控制器可以灵活设置1,2,4倍频,默认1倍频计数,如下图
ETH6045-0416脱机独立WINCE运动控制器,四倍频实际测试效果
1.控制器DB15接口与光栅尺,松下伺服驱动器接线图。
2.软件界面先发1um对应的脉冲,编码器读数为1,示波器看到EA,EB的波形如下,EA=1,EB=0。
软件界面再发第2,3,4个 1um对应的脉冲后,示波器EA,EB波形如下:
3.测试环境与工具如下图。
光栅尺读数表用于对比控制器读数,电脑通过网线VNC工具控制控制器内部软件,同时通过网口远程单步调试WINCE程序。
需要了解产品具体参数或相关技术问题等,可直接与QQ:67336830或TEL:18971190302 刘工联系。
运动控制专业服务商将为您提供各类运动控制自动化相关系统、完善的售后服务以及专业的技术支持。
